
Շառավղային հոսքային շարժիչների համեմատ, առանցքային հոսքային շարժիչները էլեկտրական տրանսպորտային միջոցների նախագծման մեջ ունեն բազմաթիվ առավելություններ: Օրինակ, առանցքային հոսքային շարժիչները կարող են փոխել շարժիչի կառուցվածքը՝ շարժիչը առանցքից տեղափոխելով անիվների ներս:
1. Ուժի առանցք
Առանցքային հոսքի շարժիչներԱվելի ու ավելի մեծ ուշադրության են արժանանում (ավելի մեծ տարածում են գտնում): Տարիներ շարունակ այս տեսակի շարժիչն օգտագործվել է ստացիոնար կիրառություններում, ինչպիսիք են վերելակները և գյուղատնտեսական մեքենաները, սակայն վերջին տասնամյակում շատ մշակողներ աշխատել են այս տեխնոլոգիան կատարելագործելու և այն էլեկտրական մոտոցիկլետների, օդանավակայանների պարկուճների, բեռնատարների, էլեկտրական տրանսպորտային միջոցների և նույնիսկ ինքնաթիռների վրա կիրառելու ուղղությամբ:
Ավանդական ռադիալ հոսքային շարժիչները օգտագործում են մշտական մագնիսներ կամ ինդուկցիոն շարժիչներ, որոնք զգալի առաջընթաց են գրանցել քաշի և արժեքի օպտիմալացման գործում: Այնուամենայնիվ, դրանք բախվում են բազմաթիվ դժվարությունների շարունակական զարգացման հարցում: Առանցքային հոսքը, որը բոլորովին այլ տեսակի շարժիչ է, կարող է լավ այլընտրանք լինել:
Ճառագայթային շարժիչների համեմատ, առանցքային հոսքի մշտական մագնիսով շարժիչների արդյունավետ մագնիսական մակերեսը շարժիչի ռոտորի մակերեսն է, այլ ոչ թե արտաքին տրամագիծը: Հետևաբար, շարժիչի որոշակի ծավալի դեպքում առանցքային հոսքի մշտական մագնիսով շարժիչները սովորաբար կարող են ապահովել ավելի մեծ պտտող մոմենտ:
Առանցքային հոսքի շարժիչներավելի կոմպակտ են. համեմատած ռադիալ շարժիչների հետ, շարժիչի առանցքային երկարությունը շատ ավելի կարճ է: Ներքին անիվային շարժիչների համար սա հաճախ կարևոր գործոն է: Առանցքային շարժիչների կոմպակտ կառուցվածքը ապահովում է ավելի բարձր հզորության խտություն և պտտող մոմենտի խտություն, քան նմանատիպ ռադիալ շարժիչները, այդպիսով վերացնելով չափազանց բարձր աշխատանքային արագությունների անհրաժեշտությունը:
Առանցքային հոսքի շարժիչների արդյունավետությունը նույնպես շատ բարձր է, սովորաբար գերազանցում է 96%-ը։ Սա պայմանավորված է ավելի կարճ, միաչափ հոսքի ուղով, որը համեմատելի է կամ նույնիսկ ավելի բարձր արդյունավետությամբ՝ համեմատած շուկայում առկա լավագույն 2D շառավղային հոսքի շարժիչների հետ։
Շարժիչի երկարությունը ավելի կարճ է, սովորաբար 5-8 անգամ, իսկ քաշը նույնպես կրճատվում է 2-5 անգամ։ Այս երկու գործոնները փոխել են էլեկտրական մեքենաների հարթակների նախագծողների ընտրությունը։
2. Առանցքային հոսքի տեխնոլոգիա
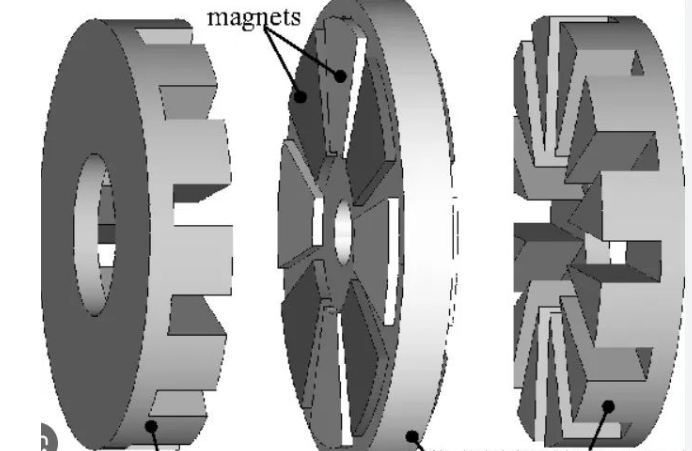
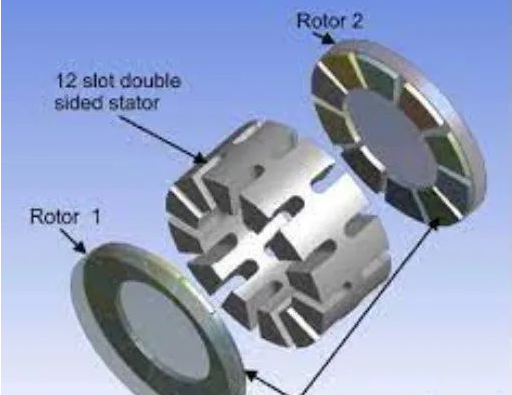
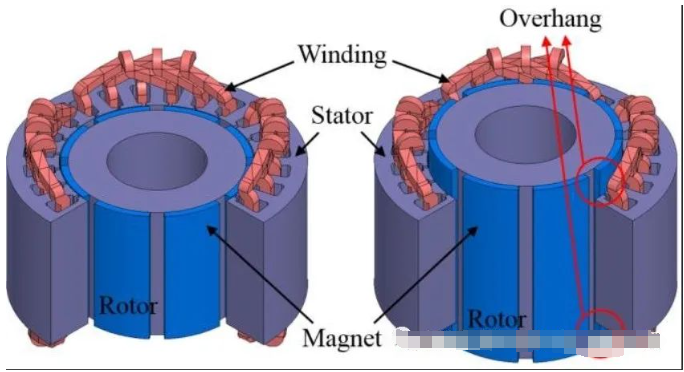
Կան երկու հիմնական տոպոլոգիաներ՝առանցքային հոսքի շարժիչներ՝ կրկնակի ռոտորով մեկ ստատորով (երբեմն անվանում են տորուսային ոճի մեքենաներ) և մեկ ռոտորով կրկնակի ստատորով։
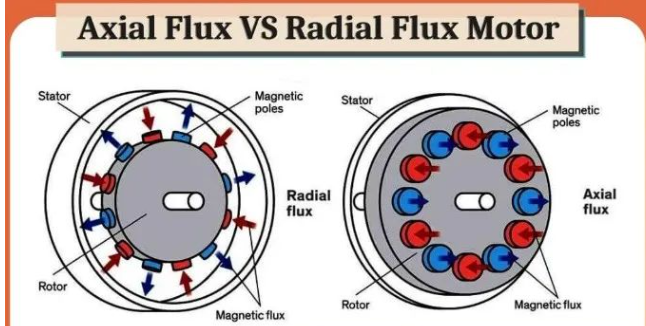
Ներկայումս մշտական մագնիսով շարժիչների մեծ մասը օգտագործում է շառավղային հոսքի տոպոլոգիա։ Մագնիսական հոսքի սխեման սկսվում է ռոտորի վրա գտնվող մշտական մագնիսից, անցնում է ստատորի առաջին ատամի միջով, ապա շառավղային ուղղությամբ հոսում է ստատորի երկայնքով։ Այնուհետև անցնում է երկրորդ ատամի միջով՝ հասնելով ռոտորի վրա գտնվող երկրորդ մագնիսական պողպատին։ Երկակի ռոտորի առանցքային հոսքի տոպոլոգիայում հոսքի օղակը սկսվում է առաջին մագնիսից, անցնում է առանցքային ուղղությամբ ստատորի ատամների միջով և անմիջապես հասնում երկրորդ մագնիսին։
Սա նշանակում է, որ հոսքի ուղին շատ ավելի կարճ է, քան շառավղային հոսքի շարժիչներինը, ինչը հանգեցնում է շարժիչի ավելի փոքր ծավալների, ավելի բարձր հզորության խտության և նույն հզորության դեպքում արդյունավետության։
Շառավղային շարժիչ, որտեղ մագնիսական հոսքը անցնում է առաջին ատամի միջով, ապա ստատորի միջոցով վերադառնում է հաջորդ ատամին՝ հասնելով մագնիսին։ Մագնիսական հոսքը հետևում է երկչափ հետագծի։
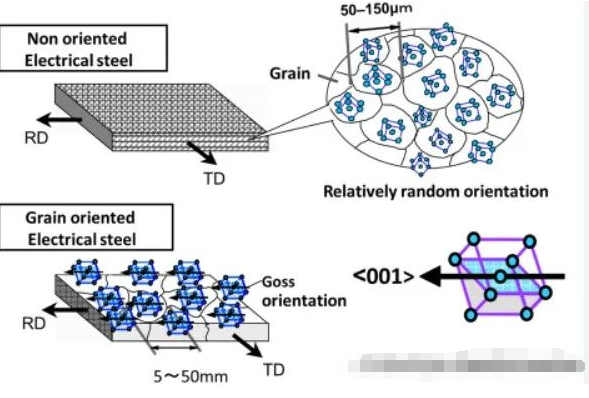
Առանցքային մագնիսական հոսքի մեքենայի մագնիսական հոսքի ուղին միաչափ է, ուստի կարելի է օգտագործել հատիկավոր կողմնորոշված էլեկտրական պողպատ։ Այս պողպատը հեշտացնում է հոսքի անցումը, դրանով իսկ բարելավելով արդյունավետությունը։
Ռադիալ հոսքային շարժիչները ավանդաբար օգտագործում են բաշխված փաթույթներ, որոնց դեպքում փաթույթների ծայրերի մինչև կեսը չի գործում: Կծիկի ավելցուկը կհանգեցնի լրացուցիչ քաշի, արժեքի, էլեկտրական դիմադրության և ջերմության կորստի ավելացման, ինչը կստիպի նախագծողներին բարելավել փաթույթների նախագծումը:
Կծիկի ծայրերըառանցքային հոսքի շարժիչներշատ ավելի քիչ են, և որոշ նախագծեր օգտագործում են կենտրոնացված կամ հատվածավորված փաթույթներ, որոնք լիովին արդյունավետ են: Սեգմենտավորված ստատորային ռադիալ մեքենաների համար ստատորում մագնիսական հոսքի ուղու խզումը կարող է լրացուցիչ կորուստներ բերել, բայց առանցքային հոսքի շարժիչների համար սա խնդիր չէ: Կծիկի փաթույթի նախագծումը մատակարարների մակարդակը տարբերակելու բանալին է:
3. Զարգացում
Առանցքային հոսքի շարժիչները նախագծման և արտադրության մեջ բախվում են լուրջ մարտահրավերների, չնայած իրենց տեխնոլոգիական առավելություններին, դրանց արժեքը շատ ավելի բարձր է, քան ճառագայթային շարժիչներինը: Մարդիկ շատ խորը պատկերացում ունեն ճառագայթային շարժիչների մասին, և արտադրության մեթոդներն ու մեխանիկական սարքավորումները նույնպես հեշտությամբ հասանելի են:
Առանցքային հոսքի շարժիչների հիմնական մարտահրավերներից մեկը ռոտորի և ստատորի միջև միատարր օդային բացը պահպանելն է, քանի որ մագնիսական ուժը շատ ավելի մեծ է, քան ռադիալ շարժիչներինը, ինչը դժվարացնում է միատարր օդային բացը պահպանելը: Երկռոտորային առանցքային հոսքի շարժիչը նույնպես ունի ջերմության ցրման խնդիրներ, քանի որ փաթույթը գտնվում է ստատորի խորքում և երկու ռոտորի սկավառակների միջև, ինչը շատ դժվարացնում է ջերմության ցրումը:
Առանցքային հոսքային շարժիչները նույնպես դժվար է արտադրել բազմաթիվ պատճառներով: Երկակի ռոտորային մեքենան, որն օգտագործում է երկակի ռոտորային մեքենա՝ լծակների տոպոլոգիայով (այսինքն՝ երկաթյա լուծը հանելով ստատորից, բայց պահպանելով երկաթյա ատամները), հաղթահարում է այս խնդիրներից մի քանիսը՝ առանց մեծացնելու շարժիչի տրամագիծը և մագնիսը:
Սակայն լծակի հեռացումը նոր մարտահրավերներ է առաջացնում, օրինակ՝ ինչպես ամրացնել և տեղադրել առանձին ատամները առանց մեխանիկական լծակի միացման: Սառեցումը նույնպես ավելի մեծ մարտահրավեր է:
Դժվար է նաև ռոտոր ստեղծել և պահպանել օդային բացը, քանի որ ռոտորի սկավառակը ձգում է ռոտորին։ Առավելությունն այն է, որ ռոտորի սկավառակները ուղղակիորեն միացված են լիսեռի օղակի միջոցով, ուստի ուժերը չեզոքացնում են միմյանց։ Սա նշանակում է, որ ներքին կրողը չի դիմանում այդ ուժերին, և դրա միակ գործառույթը ստատորը պահելն է երկու ռոտորի սկավառակների միջև միջին դիրքում։
Երկստատորային մեկ ռոտորային շարժիչները չեն բախվում շրջանաձև շարժիչների մարտահրավերներին, սակայն ստատորի նախագծումը շատ ավելի բարդ է և դժվար է ավտոմատացնել, իսկ դրա հետ կապված ծախսերը նույնպես բարձր են։ Ի տարբերություն ցանկացած ավանդական ճառագայթային հոսքային շարժիչի, առանցքային շարժիչների արտադրության գործընթացները և մեխանիկական սարքավորումները ի հայտ են եկել միայն վերջերս։
4. Էլեկտրական տրանսպորտային միջոցների կիրառումը
Հուսալիությունը կարևոր է ավտոմոբիլային արդյունաբերության մեջ և ապացուցում է տարբեր մեքենաների հուսալիությունն ու կայունությունըառանցքային հոսքի շարժիչներԱրտադրողներին համոզելը, որ այս շարժիչները հարմար են զանգվածային արտադրության համար, միշտ էլ մարտահրավեր է եղել: Սա ստիպել է առանցքային շարժիչների մատակարարներին ինքնուրույն իրականացնել լայնածավալ վավերացման ծրագրեր, որոնցից յուրաքանչյուրը ցույց է տվել, որ իրենց շարժիչի հուսալիությունը չի տարբերվում ավանդական շառավղային հոսքային շարժիչներից:
Միակ բաղադրիչը, որը կարող է մաշվելառանցքային հոսքի շարժիչէ կրողներն են։ Առանցքային մագնիսական հոսքի երկարությունը համեմատաբար կարճ է, իսկ կրողներն ավելի մոտ են դիրքին, սովորաբար նախագծված են մի փոքր «չափազանց մեծ» լինելու համար։ Բարեբախտաբար, առանցքային հոսքի շարժիչն ունի ավելի փոքր ռոտորի զանգված և կարող է դիմակայել ռոտորի դինամիկ լիսեռի ավելի ցածր բեռներին։ Հետևաբար, կրողներին կիրառվող իրական ուժը շատ ավելի փոքր է, քան շառավղային հոսքի շարժիչինը։

Էլեկտրոնային առանցքը առանցքային շարժիչների առաջին կիրառություններից մեկն է: Ավելի բարակ լայնությունը կարող է շարժիչը և փոխանցման տուփը ներառել առանցքի մեջ: Հիբրիդային կիրառություններում շարժիչի ավելի կարճ առանցքային երկարությունը, իր հերթին, կրճատում է փոխանցման համակարգի ընդհանուր երկարությունը:
Հաջորդ քայլը առանցքային շարժիչի տեղադրումն է անիվի վրա։ Այս կերպ հզորությունը կարող է անմիջապես փոխանցվել շարժիչից անիվներին՝ բարելավելով շարժիչի արդյունավետությունը։ Փոխանցման տուփերի, դիֆերենցիալների և շարժիչի լիսեռների վերացման շնորհիվ նվազեցվել է նաև համակարգի բարդությունը։
Սակայն, կարծես թե, ստանդարտ կոնֆիգուրացիաները դեռևս չեն հայտնվել: Յուրաքանչյուր օրիգինալ սարքավորումների արտադրող ուսումնասիրում է հատուկ կոնֆիգուրացիաներ, քանի որ առանցքային շարժիչների տարբեր չափսերն ու ձևերը կարող են փոխել էլեկտրական տրանսպորտային միջոցների դիզայնը: Ճառագայթային շարժիչների համեմատ, առանցքային շարժիչներն ունեն ավելի բարձր հզորության խտություն, ինչը նշանակում է, որ կարող են օգտագործվել ավելի փոքր առանցքային շարժիչներ: Սա տրանսպորտային միջոցների հարթակների համար նոր նախագծային տարբերակներ է տրամադրում, ինչպիսին է մարտկոցների տեղադրումը:
4.1 Սեգմենտացված արմատուրա
YASA (անլար և հատվածային ամրակ) շարժիչի տոպոլոգիան կրկնակի ռոտորով մեկ ստատորով տոպոլոգիայի օրինակ է, որը նվազեցնում է արտադրության բարդությունը և հարմար է ավտոմատացված զանգվածային արտադրության համար: Այս շարժիչներն ունեն մինչև 10 կՎտ/կգ հզորության խտություն 2000-ից մինչև 9000 պտույտ/րոպե արագությունների դեպքում:

Առանձնացված կարգավորիչի միջոցով այն կարող է շարժիչին ապահովել 200 կՎԱ հոսանք: Կարգավորիչն ունի մոտավորապես 5 լիտր ծավալ և կշռում է 5.8 կիլոգրամ, ներառյալ ջերմային կառավարումը դիէլեկտրիկ յուղի սառեցմամբ, հարմար է ինչպես առանցքային հոսքի շարժիչների, այնպես էլ ինդուկցիոն և շառավղային հոսքի շարժիչների համար:
Սա թույլ է տալիս էլեկտրական մեքենաների սկզբնական սարքավորումների արտադրողներին և առաջին կարգի մշակողներին ճկուն կերպով ընտրել համապատասխան շարժիչը՝ հիմնվելով կիրառման և հասանելի տարածքի վրա: Փոքր չափսերն ու քաշը մեքենան դարձնում են ավելի թեթև և ունեն ավելի շատ մարտկոցներ, այդպիսով մեծացնելով հոսանքի հզորությունը:
5. Էլեկտրական մոտոցիկլետների կիրառումը
Էլեկտրական մոտոցիկլետների և ATV-ների համար որոշ ընկերություններ մշակել են փոփոխական հոսանքի առանցքային հոսքի շարժիչներ: Այս տեսակի տրանսպորտային միջոցների համար սովորաբար օգտագործվող դիզայնը մշտական հոսանքի խոզանակային առանցքային հոսքի դիզայնն է, մինչդեռ նոր արտադրանքը փոփոխական հոսանքի, լիովին մեկուսացված, առանց խոզանակի դիզայն է:
Եվ՛ հաստատուն, և՛ փոփոխական հոսանքի շարժիչների կծիկները մնում են անշարժ, սակայն կրկնակի ռոտորները պտտվող արմատուրաների փոխարեն օգտագործում են մշտական մագնիսներ։ Այս մեթոդի առավելությունն այն է, որ այն չի պահանջում մեխանիկական շրջադարձ։
AC առանցքային կառուցվածքը կարող է նաև օգտագործել ստանդարտ եռաֆազ AC շարժիչի կարգավորիչներ ճառագայթային շարժիչների համար: Սա օգնում է կրճատել ծախսերը, քանի որ կարգավորիչը կառավարում է պտտող մոմենտի հոսանքը, այլ ոչ թե արագությունը: Կարգավորիչը պահանջում է 12 կՀց կամ ավելի բարձր հաճախականություն, որը նման սարքերի հիմնական հաճախականությունն է:
Ավելի բարձր հաճախականությունը պայմանավորված է փաթույթի ցածր՝ 20 µ H ինդուկտիվությամբ։ Հաճախականությունը կարող է կառավարել հոսանքը՝ նվազագույնի հասցնելու հոսանքի ալիքավորումը և ապահովելու սինուսոիդալ ազդանշանի հնարավորինս հարթ ստացումը։ Դինամիկ տեսանկյունից սա հիանալի միջոց է շարժիչի ավելի հարթ կառավարման հասնելու համար՝ թույլ տալով արագ ոլորող մոմենտի փոփոխություններ։
Այս դիզայնը կիրառում է բաշխված կրկնակի շերտավոր փաթույթ, ուստի մագնիսական հոսքը ստատորի միջոցով ռոտորից հոսում է դեպի մեկ այլ ռոտոր՝ շատ կարճ ճանապարհով և ավելի բարձր արդյունավետությամբ։
Այս դիզայնի գաղտնիքն այն է, որ այն կարող է աշխատել առավելագույնը 60 Վ լարման տակ և հարմար չէ բարձր լարման համակարգերի համար։ Հետևաբար, այն կարող է օգտագործվել էլեկտրական մոտոցիկլետների և L7e դասի չորսանիվ տրանսպորտային միջոցների համար, ինչպիսին է Renault Twizy-ն։
60 Վ առավելագույն լարումը թույլ է տալիս շարժիչը ինտեգրվել 48 Վ էլեկտրական համակարգերի մեջ և պարզեցնում է սպասարկման աշխատանքները։
Եվրոպական շրջանակային 2002/24/EC կանոնակարգի L7e չորսանիվ մոտոցիկլետի տեխնիկական բնութագրերը սահմանում են, որ ապրանքներ տեղափոխելու համար օգտագործվող տրանսպորտային միջոցների քաշը չպետք է գերազանցի 600 կիլոգրամը՝ բացառությամբ մարտկոցների քաշի: Այս տրանսպորտային միջոցներին թույլատրվում է տեղափոխել ոչ ավելի, քան 200 կիլոգրամ ուղևոր, ոչ ավելի, քան 1000 կիլոգրամ բեռ և ոչ ավելի, քան 15 կիլովատտ շարժիչի հզորություն: Բաշխված փաթաթման մեթոդը կարող է ապահովել 75-100 Նմ պտտող մոմենտ՝ 20-25 կՎտ գագաթնակետային ելքային հզորությամբ և 15 կՎտ անընդհատ հզորությամբ:
Առանցքային հոսքի մարտահրավերը կայանում է նրանում, թե ինչպես են պղնձե փաթույթներն ցրում ջերմությունը, ինչը դժվար է, քանի որ ջերմությունը պետք է անցնի ռոտորի միջով: Բաշխված փաթույթը այս խնդրի լուծման բանալին է, քանի որ այն ունի մեծ թվով բևեռային ճեղքեր: Այսպիսով, պղնձի և պատյանի միջև կա ավելի մեծ մակերես, և ջերմությունը կարող է փոխանցվել դեպի դուրս և դուրս մղվել ստանդարտ հեղուկային սառեցման համակարգի միջոցով:
Սինուսոիդալ ալիքային ձևերի օգտագործման համար կարևոր են բազմակի մագնիսական բևեռները, որոնք օգնում են նվազեցնել հարմոնիկները: Այս հարմոնիկները դրսևորվում են որպես մագնիսների և միջուկի տաքացում, մինչդեռ պղնձե բաղադրիչները չեն կարող ջերմությունը տանել: Երբ ջերմությունը կուտակվում է մագնիսներում և երկաթե միջուկներում, արդյունավետությունը նվազում է, այդ իսկ պատճառով ալիքային ձևի և ջերմային ուղու օպտիմալացումը կարևոր է շարժիչի աշխատանքի համար:
Շարժիչի դիզայնը օպտիմալացված է՝ ծախսերը կրճատելու և ավտոմատացված զանգվածային արտադրություն ապահովելու համար: Արտանետվող պատյանի օղակը չի պահանջում բարդ մեխանիկական մշակում և կարող է նվազեցնել նյութերի արժեքը: Կծիկը կարող է անմիջապես փաթաթվել, և փաթաթման ընթացքում օգտագործվում է կապման գործընթաց՝ ճիշտ հավաքման ձևը պահպանելու համար:
Հիմնական կետն այն է, որ կծիկը պատրաստված է ստանդարտ առևտրային մետաղալարից, մինչդեռ երկաթե միջուկը շերտավորված է ստանդարտ դասավորված տրանսֆորմատորային պողպատով, որը պարզապես պետք է կտրել ըստ ձևի: Այլ շարժիչների նախագծերը պահանջում են փափուկ մագնիսական նյութերի օգտագործում միջուկի շերտավորման համար, ինչը կարող է ավելի թանկ լինել:
Բաշխված փաթույթների օգտագործումը նշանակում է, որ մագնիսական պողպատը կարիք չունի հատվածավորվելու. դրանք կարող են ունենալ ավելի պարզ ձևեր և ավելի հեշտ արտադրվել: Մագնիսական պողպատի չափսերի փոքրացումը և դրա արտադրության հեշտության ապահովումը զգալի ազդեցություն ունի ծախսերի կրճատման վրա:
Այս առանցքային հոսքային շարժիչի դիզայնը կարող է նաև հարմարեցվել հաճախորդի պահանջներին համապատասխան: Հաճախորդները ունեն հիմնական դիզայնի շուրջ մշակված անհատականացված տարբերակներ, որոնք այնուհետև արտադրվում են փորձնական արտադրական գծում՝ վաղ արտադրության ստուգման համար, որը կարող է կրկնօրինակվել այլ գործարաններում:
Անհատականացումը հիմնականում պայմանավորված է նրանով, որ տրանսպորտային միջոցի աշխատանքը կախված է ոչ միայն առանցքային մագնիսական հոսքի շարժիչի նախագծումից, այլև տրանսպորտային միջոցի կառուցվածքի, մարտկոցի և BMS-ի որակից։
Հրապարակման ժամանակը. Սեպտեմբերի 28-2023


