
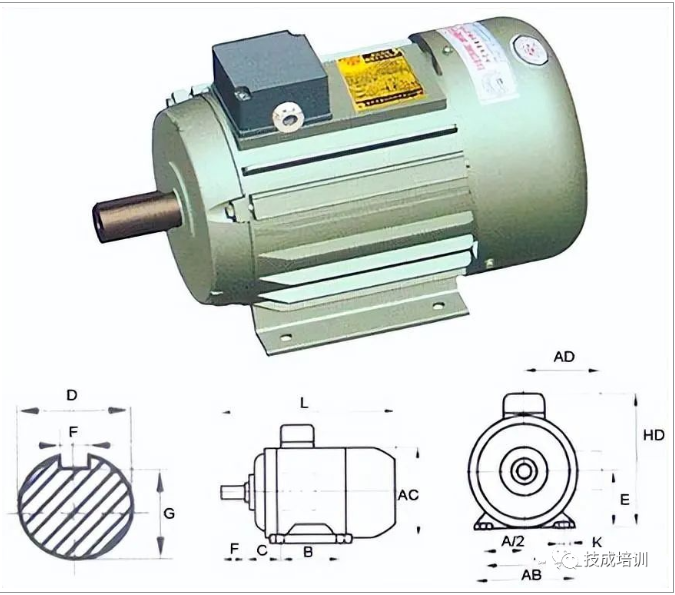
Եռաֆազ ասինխրոնշարժիչասինխրոն շարժիչի տեսակ է, որը սնուցվում է 380 Վ եռաֆազ փոփոխական հոսանքի միաժամանակյա միացմամբ (120 աստիճանի փուլային տարբերություն): Քանի որ եռաֆազ ասինխրոն շարժիչի ռոտորի և ստատորի պտտվող մագնիսական դաշտը պտտվում է նույն ուղղությամբ և տարբեր արագություններով, կա սահքի արագություն, ուստի այն կոչվում է եռաֆազ ասինխրոն շարժիչ:
Եռաֆազ ասինխրոն շարժիչի ռոտորի պտտման արագությունը ցածր է պտտվող մագնիսական դաշտի արագությունից։ Ռոտորի փաթույթը մագնիսական դաշտի հետ հարաբերական շարժման շնորհիվ առաջացնում է էլեկտրաշարժիչ ուժ և հոսանք և փոխազդում է մագնիսական դաշտի հետ՝ էլեկտրամագնիսական պտտող մոմենտ ստեղծելու համար, ապահովելով էներգիայի փոխակերպում։
Համեմատած միաֆազ ասինխրոնի հետշարժիչներ, երեք փուլային ասինխրոնշարժիչներունեն ավելի լավ գործառնական կատարողականություն և կարող են խնայել տարբեր նյութեր։
Ըստ տարբեր ռոտորային կառուցվածքների, եռաֆազ ասինխրոն շարժիչները կարելի է բաժանել վանդակի տիպի և փաթաթված տիպի
Ասինխրոն շարժիչը վանդակավոր ռոտորով ունի պարզ կառուցվածք, հուսալի շահագործում, թեթև քաշ և ցածր գին, ինչը լայնորեն կիրառվել է։ Դրա հիմնական թերությունը արագության կարգավորման դժվարությունն է։
Եռաֆազ ասինխրոն շարժիչի ռոտորը և ստատորը նույնպես հագեցած են եռաֆազ փաթույթներով և միացված են արտաքին ռեոստատին՝ սահող օղակների և խոզանակների միջոցով: Ռեոստատի դիմադրությունը կարգավորելը կարող է բարելավել շարժիչի մեկնարկային աշխատանքը և կարգավորել շարժիչի արագությունը:
Եռաֆազ ասինխրոն շարժիչի շահագործման սկզբունքը
Երբ եռաֆազ ստատորի փաթույթին կիրառվում է սիմետրիկ եռաֆազ փոփոխական հոսանք, առաջանում է պտտվող մագնիսական դաշտ, որը պտտվում է ժամացույցի սլաքի ուղղությամբ ստատորի և ռոտորի ներքին շրջանաձև տարածության երկայնքով՝ n1 համաժամանակյա արագությամբ։
Քանի որ պտտվող մագնիսական դաշտը պտտվում է n1 արագությամբ, ռոտորի հաղորդիչը սկզբում անշարժ է, ուստի ռոտորի հաղորդիչը կկտրի ստատորի պտտվող մագնիսական դաշտը՝ առաջացնելով ինդուկցված էլեկտրաշարժիչ ուժ (ինդուկցված էլեկտրաշարժիչ ուժի ուղղությունը որոշվում է աջ ձեռքի կանոնով):
Ռոտորի հաղորդչի երկու ծայրերում կարճ միացման օղակի միջոցով կարճ միացման պատճառով, ինդուկցված էլեկտրաշարժիչ ուժի ազդեցությամբ, ռոտորի հաղորդիչը կառաջացնի ինդուկցված հոսանք, որը հիմնականում նույն ուղղությամբ է, ինչ ինդուկցված էլեկտրաշարժիչ ուժը: Ռոտորի հոսանքատար հաղորդիչը ենթարկվում է էլեկտրամագնիսական ուժի ստատորի մագնիսական դաշտում (ուժի ուղղությունը որոշվում է ձախ ձեռքի կանոնով): Էլեկտրամագնիսական ուժը առաջացնում է էլեկտրամագնիսական պտտող մոմենտ ռոտորի լիսեռի վրա, ինչը ռոտորին մղում է պտտվել պտտվող մագնիսական դաշտի ուղղությամբ:
Վերոնշյալ վերլուծության միջոցով կարելի է եզրակացնել, որ էլեկտրական շարժիչի աշխատանքի սկզբունքը հետևյալն է. երբ շարժիչի եռաֆազ ստատորի փաթույթներին (յուրաքանչյուրը 120 աստիճանի էլեկտրական անկյան տարբերությամբ) սնուցում է եռաֆազ սիմետրիկ փոփոխական հոսանք, առաջանում է պտտվող մագնիսական դաշտ, որը կտրում է ռոտորի փաթույթը և առաջացնում ինդուկցված հոսանք ռոտորի փաթույթում (ռոտորի փաթույթը փակ շղթա է): Հոսանքատար ռոտորի հաղորդիչը ստատորի պտտվող մագնիսական դաշտի ազդեցության տակ կստեղծի էլեկտրամագնիսական ուժ: Այսպիսով, շարժիչի լիսեռի վրա ձևավորվում է էլեկտրամագնիսական պտտող մոմենտ, որը շարժիչը մղում է պտտվելու պտտվող մագնիսական դաշտի հետ նույն ուղղությամբ:
Եռաֆազ ասինխրոն շարժիչի միացման սխեմա
Եռաֆազ ասինխրոն շարժիչների հիմնական միացումները.
Եռաֆազ ասինխրոն շարժիչի փաթույթից վեց լարերը կարելի է բաժանել երկու հիմնական միացման մեթոդների՝ դելտա-դելտա-միացում և աստղ-միացում։
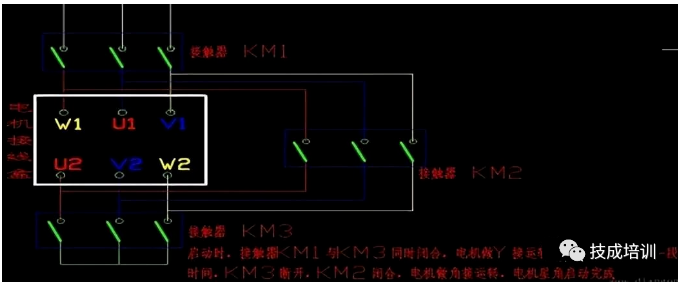
Վեց լար=երեք շարժիչի փաթույթներ=երեք գլխային ծայրեր+երեք պոչի ծայրեր, մուլտիմետրով չափվում է նույն փաթույթի գլխային և պոչի ծայրերի միջև միացումը, այսինքն՝ U1-U2, V1-V2, W1-W2:
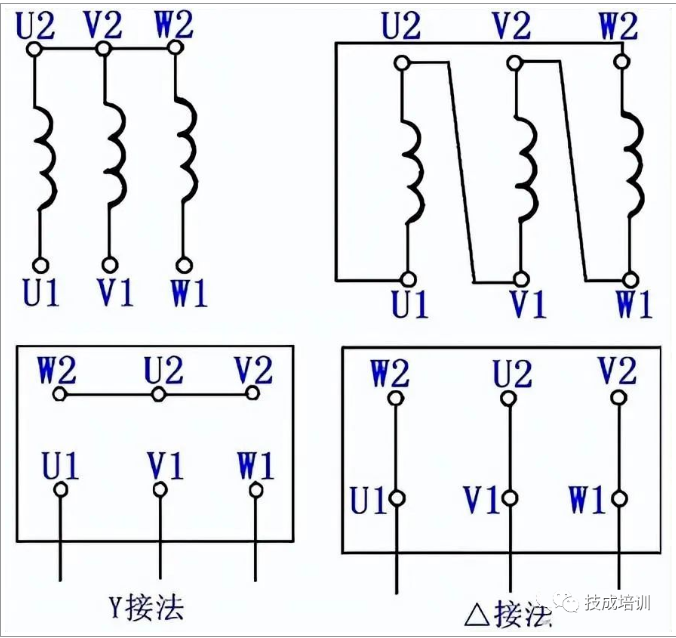
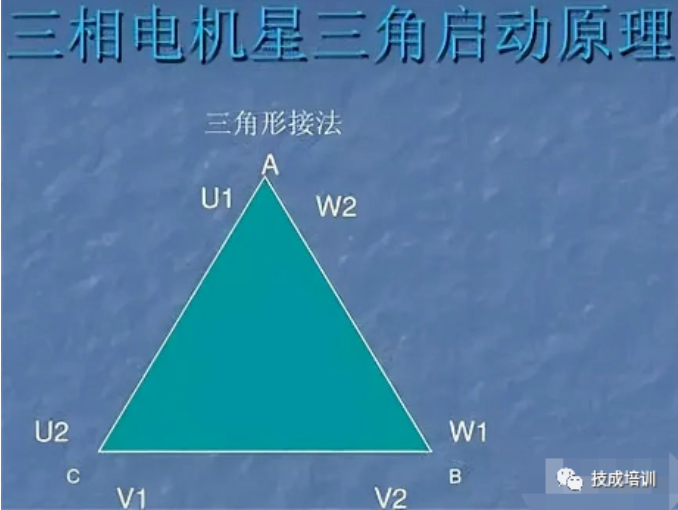
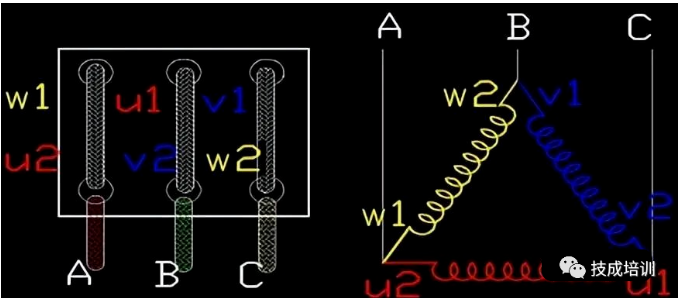
1. Եռաֆազ ասինխրոն շարժիչների եռանկյունաձև դելտայի միացման մեթոդ
Եռանկյունաձև դելտայի միացման մեթոդը երեք փաթույթների գլխիկները և պոչերը հաջորդաբար միացնելն է՝ եռանկյուն ստանալու համար, ինչպես ցույց է տրված նկարում։
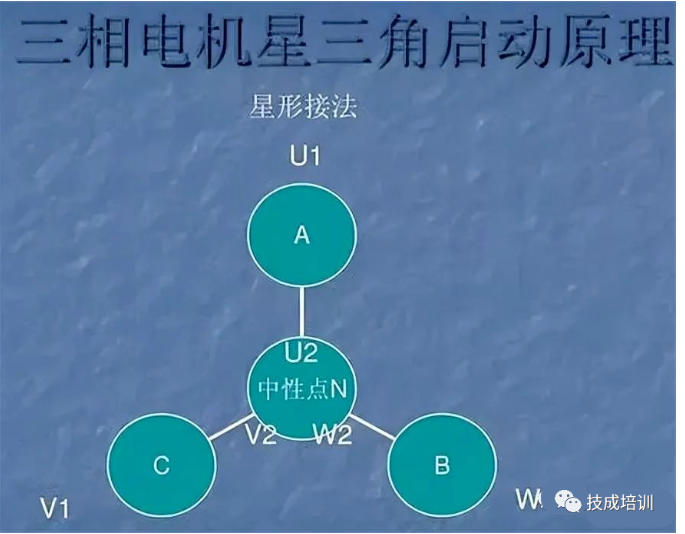
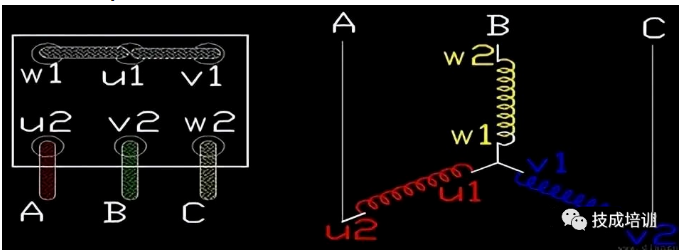
2. Եռաֆազ ասինխրոն շարժիչների աստղային միացման մեթոդ
Աստղաձև միացման մեթոդը երեք փաթույթների պոչի կամ գլխամասի ծայրերը միացնելն է, իսկ մյուս երեք լարերը օգտագործվում են որպես հոսանքի միացումներ: Միացման եղանակը, ինչպես ցույց է տրված նկարում.
Եռաֆազ ասինխրոն շարժիչի միացման սխեմայի բացատրությունը նկարներով և տեքստով
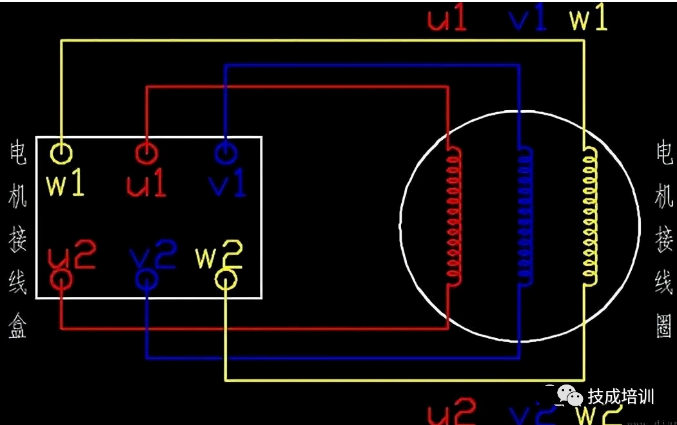
Եռաֆազ շարժիչի միացման տուփ
Երբ միացված է եռաֆազ ասինխրոն շարժիչը, միացման տուփում միացնող մասի միացման եղանակը հետևյալն է.
Երբ եռաֆազ ասինխրոն շարժիչը միացված է անկյունում, միացման տուփի միացման կտորի միացման եղանակը հետևյալն է.
Եռաֆազ ասինխրոն շարժիչների միացման երկու եղանակ կա՝ աստղաձև և եռանկյունաձև։
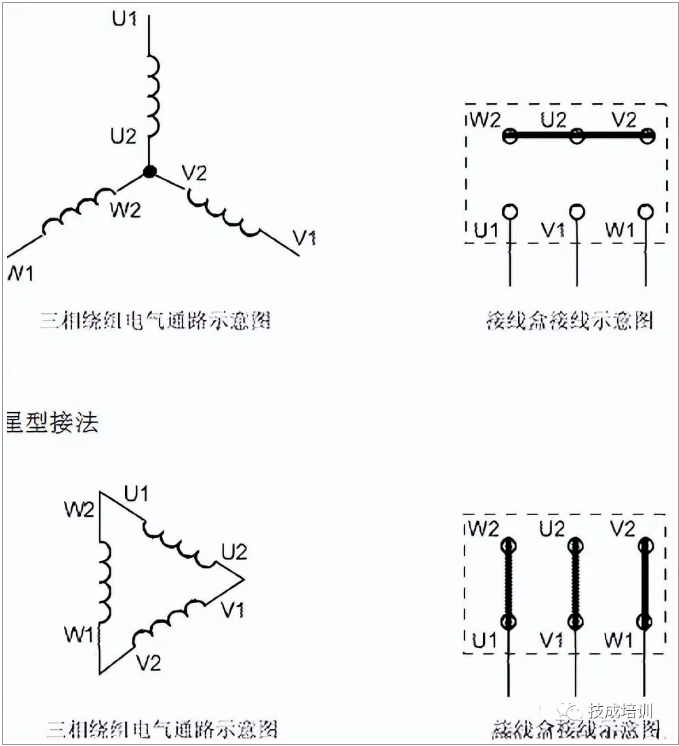
Եռանկյունացման մեթոդ
Նույն լարման և լարի տրամագծի ունեցող փաթաթաններում աստղաձև միացման մեթոդը ունի երեք անգամ ավելի քիչ պտույտ մեկ փուլի համար (1.732 անգամ) և երեք անգամ ավելի քիչ հզորություն, քան եռանկյունաձև միացման մեթոդը: Պատրաստի շարժիչի միացման մեթոդը ամրագրված է 380 Վ լարմանը դիմակայելու համար և, ընդհանուր առմամբ, հարմար չէ փոփոխության համար:
Միացման եղանակը կարող է փոխվել միայն այն դեպքում, երբ եռաֆազ լարման մակարդակը տարբերվում է սովորական 380 Վ-ից: Օրինակ, երբ եռաֆազ լարման մակարդակը 220 Վ է, կարելի է կիրառելի դարձնել սկզբնական եռաֆազ լարման 380 Վ աստղաձև միացման եղանակը եռանկյունաձև միացման եղանակով փոխելը: Երբ եռաֆազ լարման մակարդակը 660 Վ է, սկզբնական եռաֆազ լարման 380 Վ դելտա միացման եղանակը կարող է փոխվել աստղաձև միացման եղանակով, և դրա հզորությունը մնում է անփոփոխ: Սովորաբար, ցածր հզորության շարժիչները միացված են աստղաձև, մինչդեռ բարձր հզորության շարժիչները՝ եռանկյունաձև միացված:
Անվանական լարման դեպքում պետք է օգտագործել եռանկյունաձև միացված շարժիչ։ Եթե այն փոխարինվում է աստղաձև միացված շարժիչով, այն ունի ցածր լարման աշխատանք, ինչը հանգեցնում է շարժիչի հզորության և մեկնարկային հոսանքի նվազմանը։ Բարձր հզորության շարժիչը գործարկելիս (եռանկյունաձև միացման մեթոդ) հոսանքը շատ բարձր է։ Գծի վրա մեկնարկային հոսանքի ազդեցությունը նվազեցնելու համար սովորաբար կիրառվում է աստիճանական մեկնարկ։ Մեկ մեթոդը մեկնարկի համար սկզբնական եռանկյունաձև միացման մեթոդը աստղաձև միացման մեթոդով փոխելն է։ Աստղաձև միացման մեթոդը գործարկելուց հետո այն կրկին փոխակերպվում է եռանկյունաձև միացման մեթոդի։
Եռաֆազ ասինխրոն շարժիչի միացման սխեմա
Եռաֆազ ասինխրոն շարժիչների համար ուղիղ և հակադարձ փոխանցման գծերի ֆիզիկական դիագրամ.
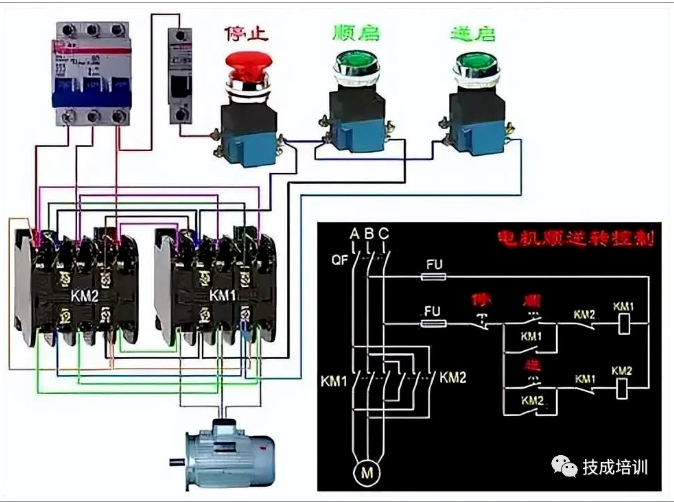
Շարժիչի ուղիղ և հակադարձ կառավարումն իրականացնելու համար նրա էլեկտրամատակարարման ցանկացած երկու փուլեր կարող են կարգավորվել միմյանց նկատմամբ (մենք դա անվանում ենք կոմուտացիա): Սովորաբար, V փուլը մնում է անփոփոխ, իսկ U և W փուլերը՝ կարգավորվում միմյանց նկատմամբ: Որպեսզի շարժիչի փուլերի հաջորդականությունը հուսալիորեն փոխվի երկու կոնտակտորների գործողության ժամանակ, լարերը պետք է համապատասխանեն շփման վերին միացքին, իսկ փուլը պետք է կարգավորվի կոնտակտորի ստորին միացքին: Երկու փուլերի փուլերի հաջորդականության փոխանակման պատճառով անհրաժեշտ է ապահովել, որ երկու KM կծիկները չկարողանան միաժամանակ միացվել, հակառակ դեպքում կարող են առաջանալ լուրջ փուլից փուլ կարճ միացման խափանումներ: Հետևաբար, պետք է կիրառվի փոխկապակցվածություն:
Անվտանգության նկատառումներից ելնելով, հաճախ օգտագործվում է կրկնակի փոխկապակցված առաջ և հետ կառավարման սխեմա՝ կոճակների փոխկապակցմամբ (մեխանիկական) և կոնտակտորների փոխկապակցմամբ (էլեկտրական): Կոճակների փոխկապակցմամբ, նույնիսկ եթե առաջ և հետ կոճակները միաժամանակ սեղմվում են, փուլի կարգավորման համար օգտագործվող երկու կոնտակտորները չեն կարող միաժամանակ միացվել, մեխանիկորեն խուսափելով փուլից փուլ կարճ միացումներից:
Բացի այդ, կիրառվող կոնտակտորների փոխկապակցվածության պատճառով, քանի դեռ կոնտակտորներից մեկը միացված է, նրա երկար փակ կոնտակտը չի փակվի: Այսպիսով, մեխանիկական և էլեկտրական կրկնակի փոխկապակցվածության կիրառման դեպքում, շարժիչի էլեկտրամատակարարման համակարգը չի կարող ունենալ փուլից փուլ կարճ միացում, արդյունավետորեն պաշտպանելով շարժիչը և խուսափելով փուլային մոդուլյացիայի ընթացքում փուլից փուլ կարճ միացումներից առաջացած վթարներից, որոնք կարող են այրել կոնտակտորը:
Հրապարակման ժամանակը. Օգոստոս-07-2023


