
Մաքուր էլեկտրական մեքենայի կառուցվածքը և դիզայնը տարբերվում է ավանդական ներքին այրման շարժիչով ավտոմեքենայի կառուցվածքից: Այն նաև համալիր համակարգի ճարտարագիտություն է: Այն պետք է ինտեգրի էներգիայի մարտկոցի տեխնոլոգիան, շարժիչի շարժիչ տեխնոլոգիան, ավտոմոբիլային տեխնոլոգիան և կառավարման ժամանակակից տեսությունը՝ օպտիմալ կառավարման գործընթացի հասնելու համար: Էլեկտրական տրանսպորտային միջոցների գիտության և տեխնոլոգիայի զարգացման ծրագրում երկիրը շարունակում է հավատարիմ մնալ «երեք ուղղահայաց և երեք հորիզոնականների» R&D դասավորությանը, և հետագայում կարևորում է «երեք հորիզոնական» ընդհանուր հիմնական տեխնոլոգիաների վերաբերյալ հետազոտությունը՝ համաձայն տեխնոլոգիական վերափոխման ռազմավարության: «մաքուր էլեկտրական շարժիչ», այսինքն՝ հետազոտություն շարժիչի շարժիչի և դրա կառավարման համակարգի, էներգիայի մարտկոցի և դրա կառավարման համակարգի, ինչպես նաև էլեկտրահաղորդման կառավարման համակարգի վերաբերյալ: Յուրաքանչյուր խոշոր արտադրող ձևավորում է իր սեփական բիզնեսի զարգացման ռազմավարությունը՝ համաձայն ազգային զարգացման ռազմավարության:
Հեղինակը դասավորում է հիմնական տեխնոլոգիաները նոր էներգահամակարգի մշակման գործընթացում՝ ապահովելով տեսական հիմք և տեղեկանք էլեկտրահաղորդման նախագծման, փորձարկման և արտադրության համար: Ծրագիրը բաժանված է երեք գլուխների՝ վերլուծելու էլեկտրական շարժիչի հիմնական տեխնոլոգիաները մաքուր էլեկտրական տրանսպորտային միջոցների ուժային համակարգում: Այսօր մենք նախ կներկայացնենք էլեկտրական շարժիչ տեխնոլոգիաների սկզբունքը և դասակարգումը:
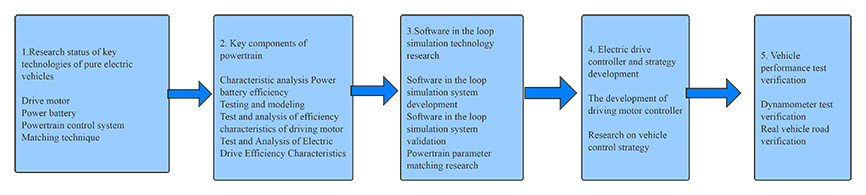
Գծապատկեր 1 Հիմնական կապերը Էլեկտրահաղորդման նախագծման մեջ
Ներկայում, մաքուր էլեկտրական տրանսպորտային միջոցների հիմնական տեխնոլոգիաները ներառում են հետևյալ չորս կատեգորիաները.
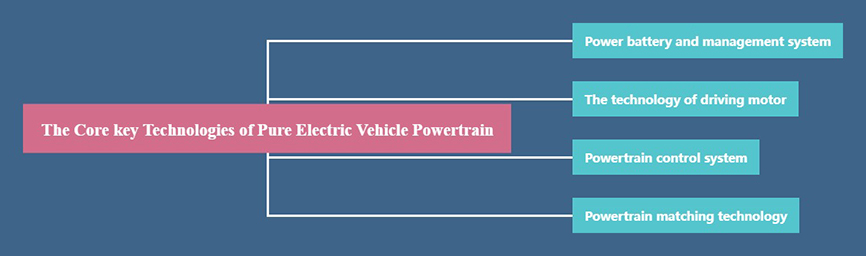
Նկար 2 Էլեկտրահաղորդման հիմնական հիմնական տեխնոլոգիաները
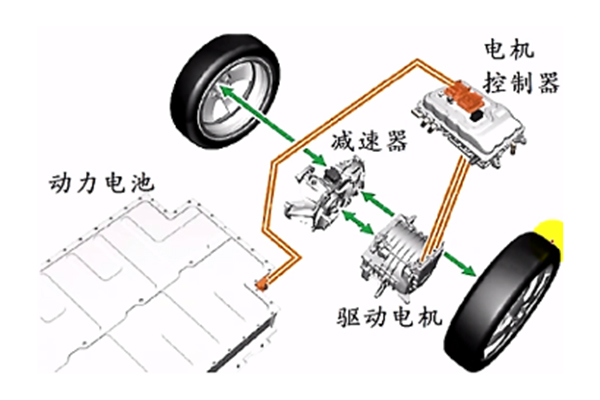
Շարժիչային շարժիչի սահմանումը
Ըստ մեքենայի էներգիայի մարտկոցի կարգավիճակի և մեքենայի էներգիայի պահանջների՝ այն փոխակերպում է էլեկտրաէներգիայի թողարկված էներգիայի կուտակման սարքի կողմից մեխանիկական էներգիայի, իսկ էներգիան փոխանցվում է շարժիչ անիվներին փոխանցող սարքի և մասերի միջոցով։ տրանսպորտային միջոցի մեխանիկական էներգիան վերածվում է էլեկտրական էներգիայի և վերադարձվում էներգիայի պահպանման սարքին, երբ մեքենան արգելակում է: Էլեկտրական շարժիչ համակարգը ներառում է շարժիչ, փոխանցման մեխանիզմ, շարժիչի կարգավորիչ և այլ բաղադրիչներ: Էլեկտրական էներգիայի շարժիչ համակարգի տեխնիկական պարամետրերի նախագծումը հիմնականում ներառում է հզորությունը, ոլորող մոմենտը, արագությունը, լարումը, փոխանցման նվազեցման գործակիցը, էլեկտրամատակարարման հզորությունը, ելքային հզորությունը, լարումը, հոսանքը և այլն:

1) Շարժիչի կարգավորիչ
Նաև կոչվում է ինվերտոր, այն փոխում է հոսանքի մարտկոցի ուղղակի հոսանքի մուտքը փոփոխական հոսանքի: Հիմնական բաղադրիչներ.
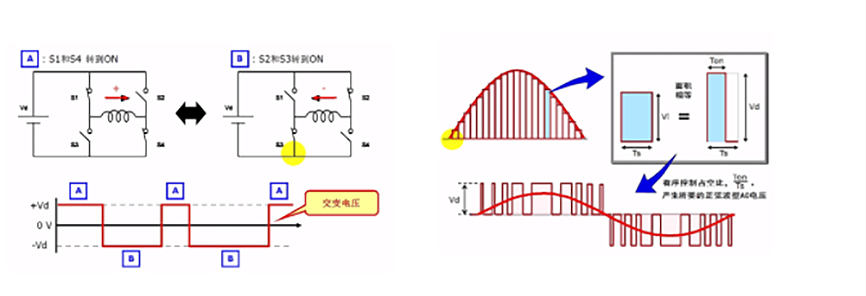
◎ IGBT՝ հոսանքի էլեկտրոնային անջատիչ, սկզբունք՝ կարգավորիչի միջոցով, կառավարել IGBT կամրջի թեւը՝ փակելու որոշակի հաճախականություն և հաջորդականության անջատիչ՝ եռաֆազ փոփոխական հոսանք առաջացնելու համար: Կառավարելով հոսանքի էլեկտրոնային անջատիչը փակելու համար, փոփոխական լարումը կարող է փոխարկվել: Այնուհետև AC լարումը ստեղծվում է աշխատանքային ցիկլը վերահսկելու միջոցով:
◎ Ֆիլմի հզորություն. զտիչ ֆունկցիա; ընթացիկ սենսոր. հայտնաբերում է եռաֆազ ոլորման հոսանքը:
2) Կառավարման և վարման սխեման՝ համակարգչի կառավարման տախտակ, վարող IGBT
Շարժիչի կարգավորիչի դերն է փոխարկել DC-ն AC-ի, ստանալ յուրաքանչյուր ազդանշան և թողարկել համապատասխան հզորությունը և ոլորող մոմենտը: Հիմնական բաղադրիչները՝ հոսանքի էլեկտրոնային անջատիչ, ֆիլմի կոնդենսատոր, հոսանքի սենսոր, հսկիչ շարժիչի միացում՝ տարբեր անջատիչներ բացելու, տարբեր ուղղություններով հոսանքներ ձևավորելու և փոփոխական լարման առաջացման համար: Այսպիսով, մենք կարող ենք սինուսոիդային փոփոխական հոսանքը բաժանել ուղղանկյունների: Ուղղանկյունների մակերեսը վերածվում է նույն բարձրությամբ լարման։ X-առանցքը գիտակցում է երկարության հսկողությունը՝ վերահսկելով աշխատանքային ցիկլը, և վերջապես գիտակցում է տարածքի համարժեք փոխարկումը: Այս կերպ, հաստատուն հոսանքը կարող է կառավարվել՝ փակելու IGBT կամրջի թեւը որոշակի հաճախականությամբ և հաջորդականությամբ անջատիչով կարգավորիչի միջոցով՝ եռաֆազ AC հոսանք առաջացնելու համար:
Ներկայումս շարժիչի սխեմայի հիմնական բաղադրիչները կախված են ներմուծումից՝ կոնդենսատորներ, IGBT/MOSFET անջատիչ խողովակներ, DSP, էլեկտրոնային չիպեր և ինտեգրալ սխեմաներ, որոնք կարող են ինքնուրույն արտադրվել, բայց ունեն թույլ հզորություն. հատուկ սխեմաներ, սենսորներ, միակցիչներ, որոնք կարող են լինել։ ինքնուրույն արտադրված՝ սնուցման աղբյուրներ, դիոդներ, ինդուկտորներ, բազմաշերտ տպատախտակներ, մեկուսացված լարեր, ռադիատորներ։
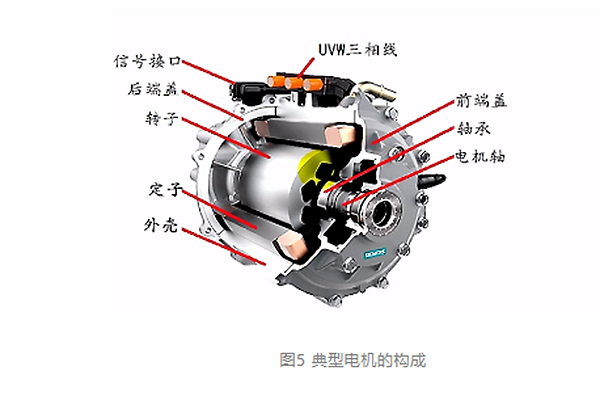
3) Շարժիչ՝ եռաֆազ փոփոխական հոսանքը վերածել մեքենայի
◎ Կառուցվածք՝ առջևի և հետևի ծայրերի ծածկոցներ, պատյաններ, լիսեռներ և առանցքակալներ
◎ Մագնիսական միացում՝ ստատորի միջուկ, ռոտորի միջուկ
◎ Շղթա՝ ստատորի ոլորուն, ռոտորի հաղորդիչ
4) փոխանցող սարք
Փոխանցման տուփը կամ ռեդուկտորը փոխակերպում է շարժիչի պտտվող պտտման արագությունը ամբողջ մեքենայի համար պահանջվող արագության և ոլորող մոմենտի:
Շարժիչի շարժիչի տեսակը
Շարժիչային շարժիչները բաժանված են հետևյալ չորս կատեգորիաների. Ներկայումս AC ինդուկցիոն շարժիչները և մշտական մագնիսների համաժամանակյա շարժիչները նոր էներգիայի էլեկտրական մեքենաների ամենատարածված տեսակներն են: Այսպիսով, մենք կենտրոնանում ենք AC ինդուկցիոն շարժիչի և մշտական մագնիսների համաժամանակյա շարժիչի տեխնոլոգիայի վրա:
| DC շարժիչ | AC ինդուկցիոն շարժիչ | Մշտական մագնիս սինխրոն շարժիչ | Անջատված դժկամության շարժիչ | |
| Առավելություն | Ավելի ցածր արժեք, վերահսկման համակարգի ցածր պահանջներ | Ցածր արժեք, էներգիայի լայն ծածկույթ, մշակված կառավարման տեխնոլոգիա, բարձր հուսալիություն | Բարձր հզորության խտություն, բարձր արդյունավետություն, փոքր չափսեր | Պարզ կառուցվածք, Կառավարման համակարգի ցածր պահանջներ |
| Անբարենպաստություն | Բարձր սպասարկման պահանջներ, ցածր արագություն, ցածր պտտող մոմենտ, կարճ ժամկետ | Փոքր արդյունավետ տարածք Հզորության ցածր խտություն | Բարձր արժեքը Վատ շրջակա միջավայրի հարմարվողականություն | Մեծ ոլորող մոմենտ ստեղծելու մեծ տատանում Բարձր աշխատանքային աղմուկ |
| Դիմում | Փոքր կամ մինի ցածր արագությամբ էլեկտրական մեքենա | Էլեկտրական բիզնես և մարդատար ավտոմեքենաներ | Էլեկտրական բիզնես և մարդատար ավտոմեքենաներ | Mixture-power Vehicle |
 1) AC ինդուկցիոն ասինխրոն շարժիչ
1) AC ինդուկցիոն ասինխրոն շարժիչ
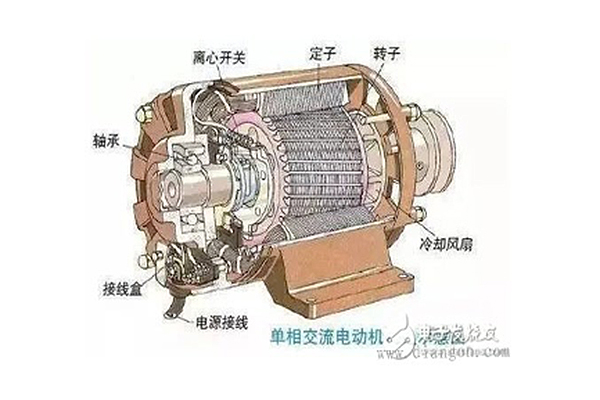
AC ինդուկտիվ ասինխրոն շարժիչի աշխատանքի սկզբունքն այն է, որ ոլորուն անցնելու է ստատորի բնիկով և ռոտորով. այն կուտակված է բարակ պողպատե թիթեղներով՝ բարձր մագնիսական հաղորդունակությամբ: Եռաֆազ հոսանքը կանցնի ոլորուն միջով։ Ֆարադեյի էլեկտրամագնիսական ինդուկցիայի օրենքի համաձայն՝ պտտվող մագնիսական դաշտ է առաջանալու, ինչի պատճառով էլ ռոտորը պտտվում է։ Ստատորի երեք կծիկները միացված են 120 աստիճանի ընդմիջումով, և հոսանք կրող հաղորդիչը դրանց շուրջ մագնիսական դաշտեր է առաջացնում։ Երբ եռաֆազ սնուցումը կիրառվում է այս հատուկ դասավորության վրա, մագնիսական դաշտերը կփոխվեն տարբեր ուղղություններով՝ որոշակի ժամանակում փոփոխական հոսանքի փոփոխությամբ՝ առաջացնելով մագնիսական դաշտ՝ պտտվող միատեսակ ինտենսիվությամբ: Մագնիսական դաշտի պտտման արագությունը կոչվում է համաժամանակյա արագություն: Ենթադրենք, ներսում փակ հաղորդիչ է տեղադրված, ըստ Ֆարադեյի օրենքի, քանի որ մագնիսական դաշտը փոփոխական է, հանգույցը կզգա էլեկտրաշարժիչ ուժը, որը հոսանք կառաջացնի հանգույցում: Այս իրավիճակը նման է մագնիսական դաշտում ընթացիկ կրող օղակին, որն էլեկտրամագնիսական ուժ է առաջացնում օղակի վրա, և Հուան Ցզյանը սկսում է պտտվել: Օգտագործելով սկյուռի վանդակի նման մի բան՝ եռաֆազ փոփոխական հոսանքը կստեղծի պտտվող մագնիսական դաշտ ստատորի միջով, և հոսանքը կառաջարկվի սկյուռի վանդակի բարում, որը կարճ է ծայրի օղակով, այնպես որ ռոտորը սկսում է պտտվել, ինչը ինչու է շարժիչը կոչվում ինդուկցիոն շարժիչ: Էլեկտրամագնիսական ինդուկցիայի միջոցով, այլ ոչ թե ուղղակիորեն միացված է ռոտորին՝ էլեկտրականություն հրահրելու համար, ռոտորում լցվում են մեկուսիչ երկաթի միջուկի փաթիլներ, որպեսզի փոքր չափի երկաթը ապահովի պտտվող հոսանքի նվազագույն կորուստը:
2) AC սինխրոն շարժիչ
Սինխրոն շարժիչի ռոտորը տարբերվում է ասինխրոն շարժիչից: Մշտական մագնիսը տեղադրված է ռոտորի վրա, որը կարելի է բաժանել մակերևութային և ներկառուցված տեսակի: Ռոտորը պատրաստված է սիլիկոնային պողպատից, իսկ մշտական մագնիսը տեղադրված է: Ստատորը միացված է նաև 120 փուլային տարբերությամբ փոփոխական հոսանքով, որը վերահսկում է սինուսային ալիքի փոփոխական հոսանքի չափն ու փուլը, այնպես որ ստատորի կողմից առաջացած մագնիսական դաշտը հակառակ է ռոտորի առաջացրածին, իսկ մագնիսականը. դաշտը պտտվում է. Այս կերպ ստատորը ձգվում է մագնիսի միջոցով և պտտվում ռոտորի հետ։ Ցիկլը ցիկլի հետևից առաջանում է ստատորի և ռոտորի կլանման միջոցով:
Եզրակացություն. Էլեկտրական մեքենաների շարժիչային շարժիչը հիմնականում դարձել է հիմնական, բայց այն ոչ թե առանձին է, այլ դիվերսիֆիկացված: Յուրաքանչյուր շարժիչի շարժիչ համակարգ ունի իր համապարփակ ինդեքսը: Յուրաքանչյուր համակարգ կիրառվում է գործող էլեկտրական մեքենայի շարժիչում: Նրանցից շատերը ասինխրոն շարժիչներ են և մշտական մագնիսների համաժամանակյա շարժիչներ, մինչդեռ ոմանք փորձում են փոխել դժկամությամբ շարժիչներ: Հարկ է նշել, որ շարժիչային շարժիչը միավորում է ուժային էլեկտրոնիկայի տեխնոլոգիաները, միկրոէլեկտրոնիկայի տեխնոլոգիաները, թվային տեխնոլոգիաները, ավտոմատ կառավարման տեխնոլոգիաները, նյութագիտությունը և այլ առարկաներ՝ արտացոլելու բազմաթիվ առարկաների համապարփակ կիրառման և զարգացման հեռանկարները: Այն ուժեղ մրցակից է էլեկտրական մեքենաների շարժիչներում: Ապագա էլեկտրական մեքենաներում տեղ զբաղեցնելու համար բոլոր տեսակի շարժիչները պետք է ոչ միայն օպտիմալացնեն շարժիչի կառուցվածքը, այլև մշտապես ուսումնասիրեն կառավարման համակարգի խելացի և թվային ասպեկտները:
Հրապարակման ժամանակը՝ Հունվար-30-2023


